
리빙랩플랫폼 > 활용사례 > 지능형자동차부품진흥원
리빙랩이란?
시뮬레이션 기반 자율주행차 실증평가
기술사례
디지털 인프라 정보 연계를 통한 시뮬레이션 기반 자율주행차 실증 평가 툴 개발
2022년 공모전 우수기업 지원
지능형자동차부품진흥원-KIAPI
연구 배경
- 자율주행 안정성은 다양한 환경에서의 지속적인 테스트와 이에 따라 수집되는 데이터의 양에 좌우되며, 자율주행 기술에서 요구되는 다양한 센서의 모사, 이를 기반으로 각종 시나리오에 대한 주행/검증이 가능한 시뮬레이터 개발 필요성 있음
- 레벨4 이상의 자율주행 기술의 핵심인 인공지능은 학습 데이터의 품질(Quality)의 중요도가 매우 높기 때문에, 자율주행 시뮬레이션에서는 국내 도로 환경 및 객체를 정밀하게 모사한 가상환경을 구축하여야 함(Level Of Detail 4급 이상)
연구 목적
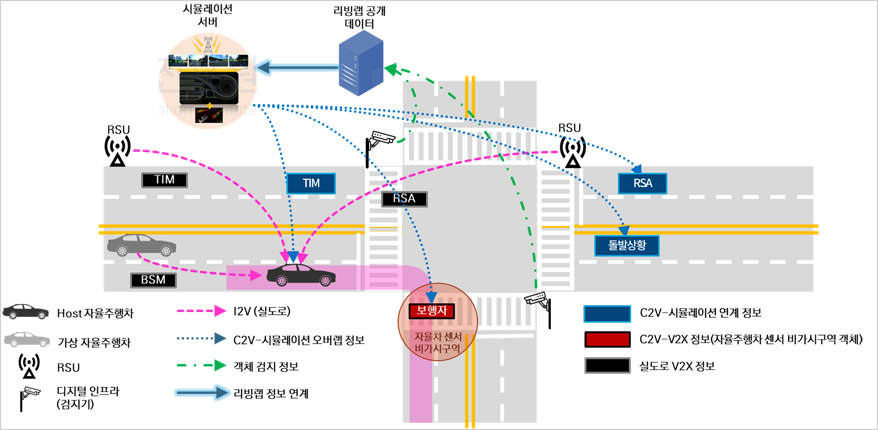
< 서비스 개요 및 시스템 구성도 >

< 가상 BSM 정보 연계 사례 >
- C-ITS 리빙랩 인프라에서 수집되는 실시간 검지 정보 및 V2X 정보와 자율주행 시뮬레이션을 연계한 자율주행 실증 툴 개발을 목적으로 함
- 자율주행 차량 센서의 비가시구역에 대해 실도로 디지털 인프라에서 실시간으로 검지된 정보를 활용하여 안전한 주행을 할 수 있는 실증 및 평가 환경 제공을 목적으로 함
주요내용
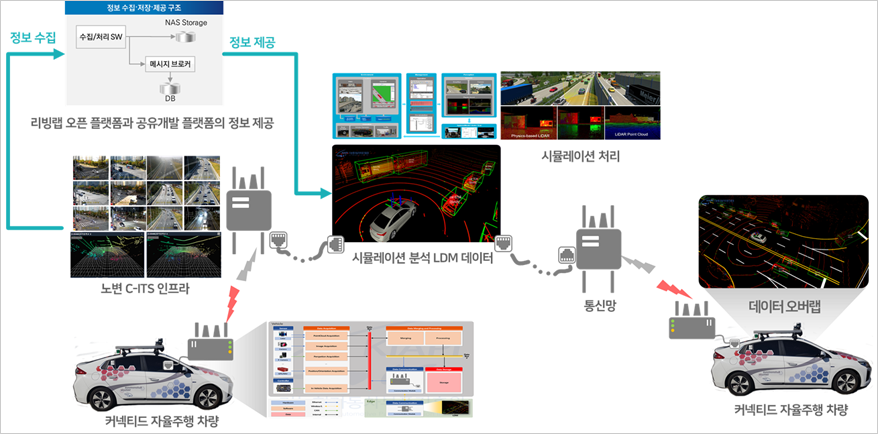
< 실도로의 검지 정보와 시뮬레이션의 연계 방안 >

< 리빙랩 연계 데이터 파싱 및 데이터 유용성 검토 >
- 실도로 검지 정보 연계를 기반으로 한 Emulator 개발(실도로 인프라 정보를 연계한 시뮬레이터 개발)
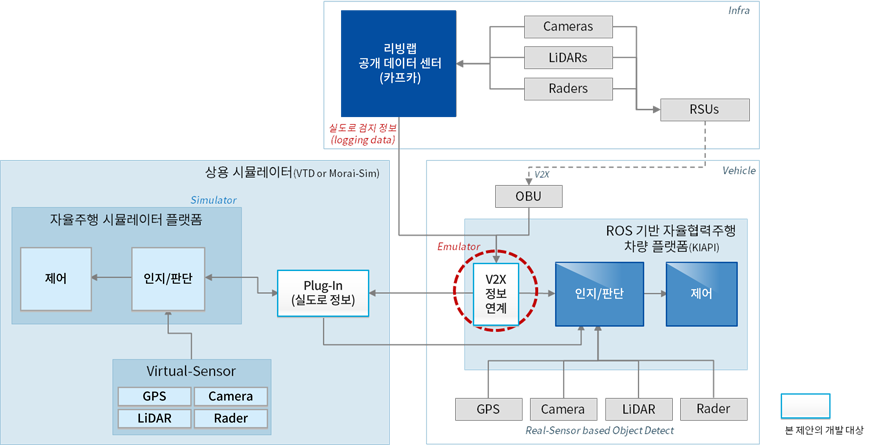
< 실도로 정보 연계를 위한 시스템 인터페이스 구성 >
- 도로인프라의 검지 정보와 자율주행 시뮬레이션 연계
- 세종시 리빙랩 도로 인프라 검지 정보 및 V2X 정보와 자율주행 시뮬레이션 연계를 통한 실증 평가 툴 개발
- 실도로 검지 정보 연계를 위한 시스템 개발